
Every generation latches onto its own quirks and visual languages. The “six–seven” hand gesture—two hands moving rhythmically up and down—became one such cultural moment. This was an opportunity to meet curiosity where it already existed and use it as a gateway to STEM learning.
Rather than explaining mechanisms abstractly, the goal was to make motion visible, tactile, and intuitive.
The entire mechanism was designed, modeled, and simulated in Fusion 360 and fabricated using PLA with a print-in-place approach, requiring careful consideration of tolerances and clearances.
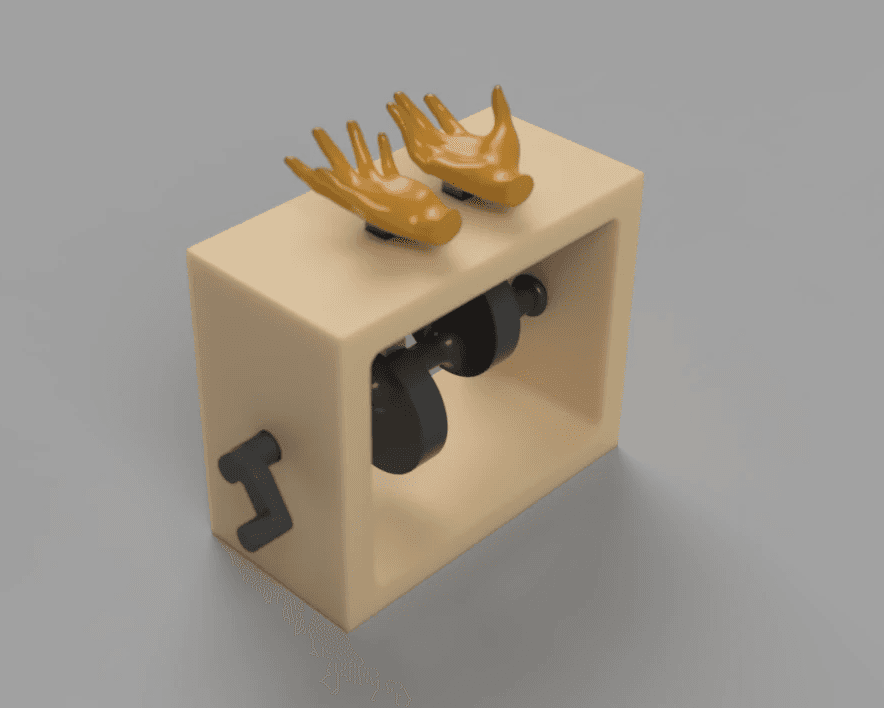

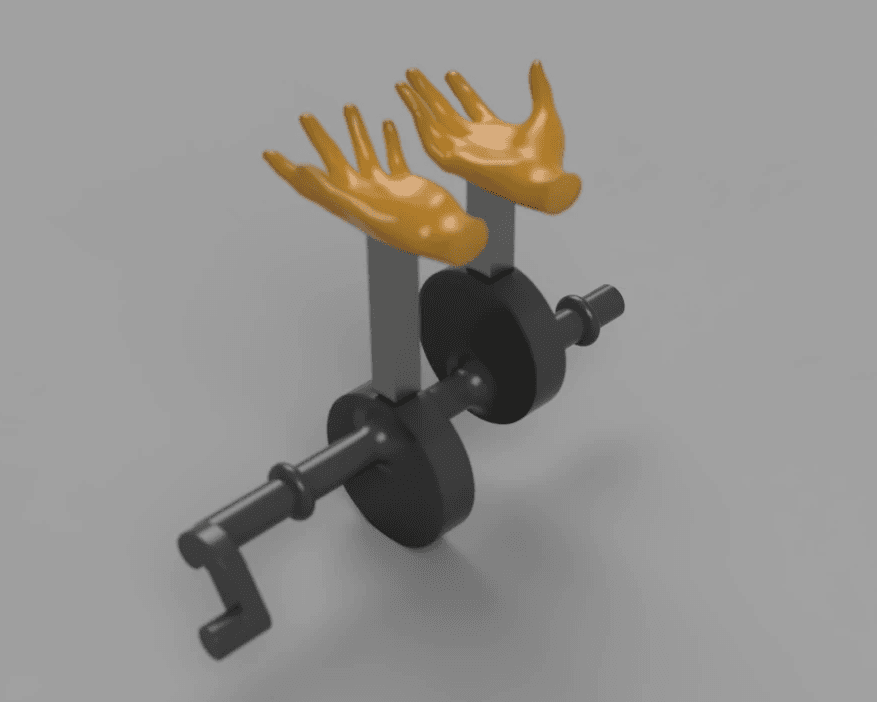

The automaton features a fully exposed mechanical system. As the user turns a hand crank, rotary motion is transmitted to a pair of offset cams. These cams are intentionally phase-shifted, causing two followers to rise and fall out of sync. The followers translate rotary motion into vertical motion, animating the hands in the familiar “six–seven” rhythm.
By interacting with the object, users implicitly learn:
Rotary-to-linear motion conversion
Phase shift through cam offset
Cam–follower interaction
Cause-and-effect relationships in mechanical systems
The learning happens through play, without instruction manuals or diagrams.
Design & Engineering
Designed, modeled, and simulated entirely in Fusion 360
Fabricated using PLA via FDM 3D printing
Employed a print-in-place strategy:
Cams, housing, and crank printed as a single assembly
No post-print assembly required
This approach turned the project into a practical study in:
Mechanical clearances and tolerances
Print orientation and friction management
Balancing durability with smooth motion
Personal Takeaway
This project was as much about designing for curiosity as it was about mechanics. It reinforced my belief that education doesn’t always need to look educational — sometimes it just needs to feel intriguing enough to be picked up and played with.
